eShapeOko Part 3 - Tidying up
Having had the ShapeOko for over a year now I've used it for quite a few projects, but nowhere near as many as I intended. Part of the reason for this is that the controller for the machine was still rather jury rigged so setting it up was a hassle. To solve this problem I've been working on integrating together a permanent version of the controller.
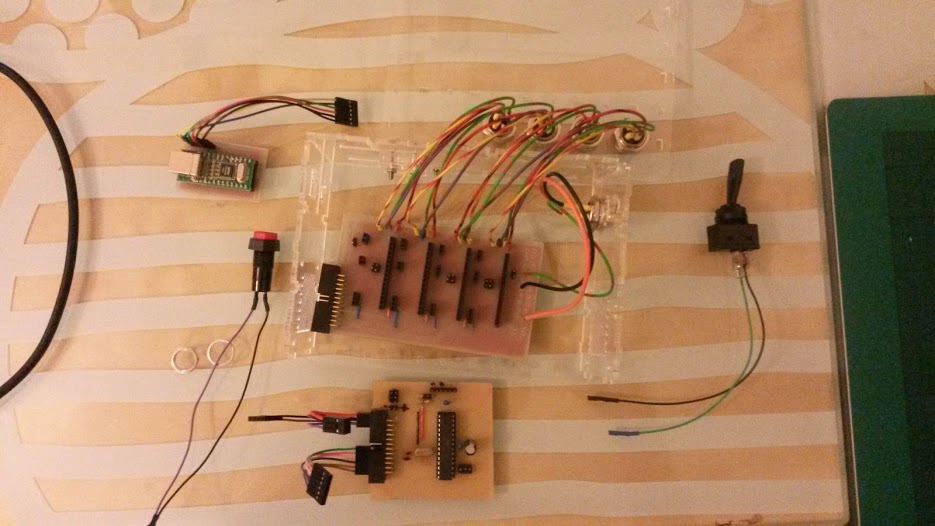
I started by designing a pair of custom PCBs with a bus to connect them together while allowing for expansion. The first board is essentially an Arduino with custom pin out. The second board mounts the stepper controllers. At some point I may add a breakout board for limit switches and a board to interface with a pendant for manually controlling the machine.
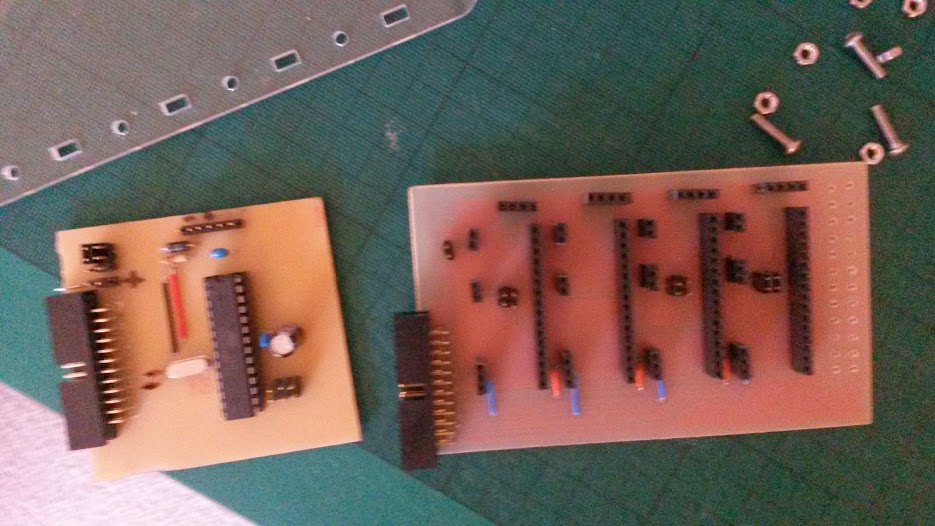
Having built the boards, they all work fine, but there are things I'd do differently if I made another. First off I'd probably stick with a standard Arduino pinout, both for reusability and because the 24 pin DIL socket I used turned out to be expensive. Additionally, the layout for the (single sided) boards would have been much simpler without the DIL socket to consider.
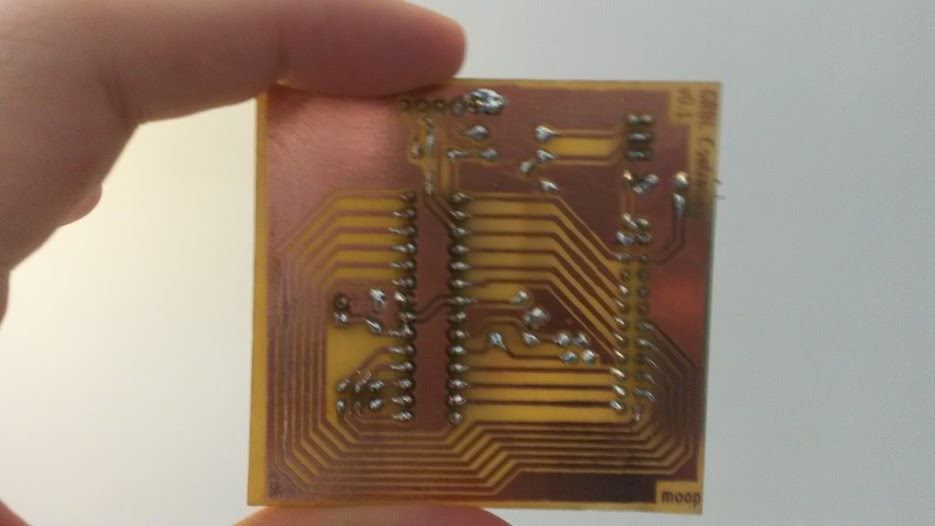
With the boards made I decided on using an FTDI module I had lying around for USB to serial conversion, replacing the Minimus that I was using previously. I designed a very simple breakout for this module to expose the Power, Reset, Ground and Serial Tx/Rx signals in a way that matches the Arduino's FTDI header. The main benefit of the breakout board, however, was that I could give it appropriate dimensions for mounting in a case.
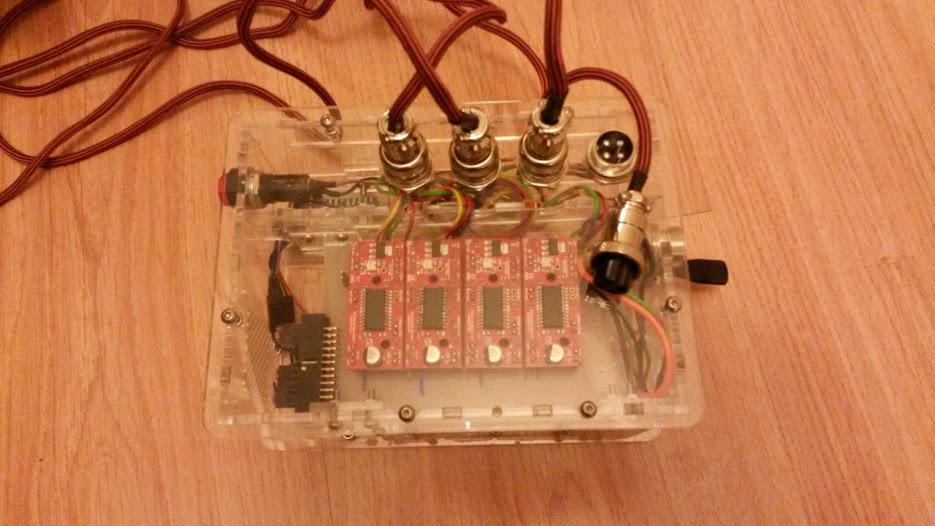
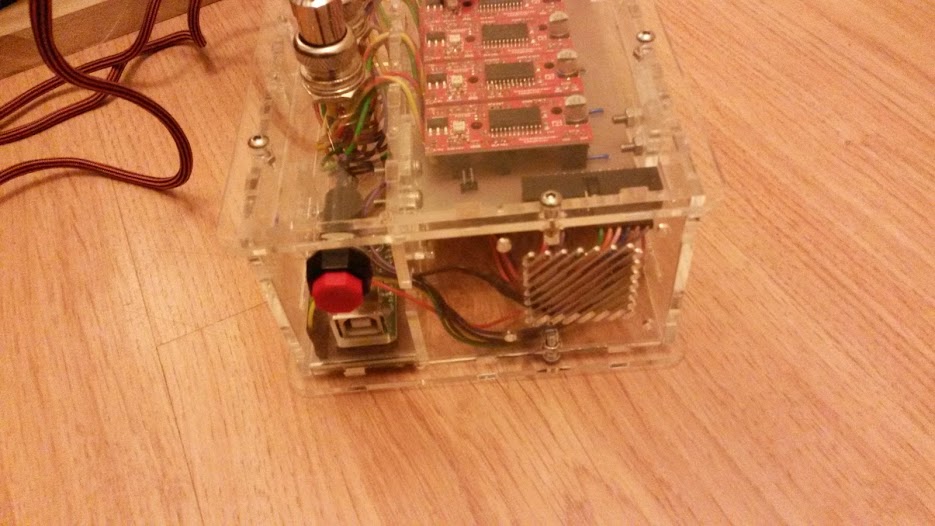
With all of the boards made and (a few months later, once a burst of motivation turned up) assembled, I needed to build a case to keep the parts together. I decided to laser cut the case from perspex in order to get it made quickly and because I thought a clear perspex case would look cool.
Due to my earlier experiences with fried Stepper Controllers I decided to use locking connectors to prevent accidental disconnection while the machine was powered up. After some searching I found that 4 pin gx16 aviation connectors seemed to do what I want. I ended up ordering some from China through Amazon as it was the cheapest source, though thanks to the seller incorrectly filling in the customs form I paid more than expected for them. Regardless, they work nicely and look good. I also used one of these connectors for power, with two pins acting as 12v and ground and spare pins for signalling. Should I choose to power the machine from a PC power supply at a later date, one of these lines will be used for the PSU's power on line.

With the connectors and some switches chosen and measured, I began work on designing the case. I settled on a fairly simple tabbed box design. The box is split into two sections to match the two widths of board: narrow USB to serial breakout and wide Arduino and Stepper Controller boards. The sides of the box have slots into which various mounting plates can be bolted. The boards locate into slots in the mounting plates, allowing for quite flexible arrangement of the boards.

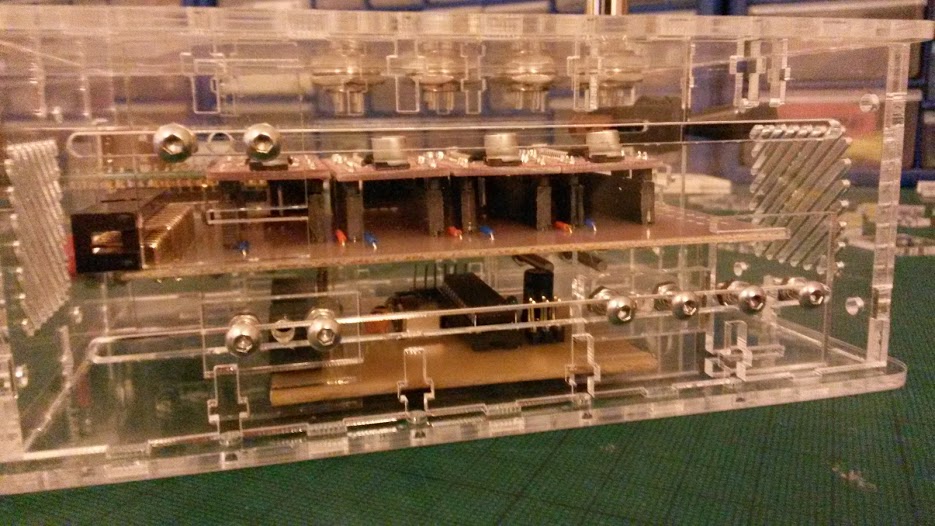
With the case parts cut, I found it fairly fiddly to assemble, but once together it was quite sturdy. Some of the wires to the connectors had to be soldered with parts of the case in place. This makes maintenance slightly trickier, but will reduce the chance of intermittent connections to the steppers which could exist if I'd used a second set of connectors on the board.
The layout of the connectors and switches was mostly determined by the shape of the case and the space taken up by the boards. I ended up with the stepper connectors on the top of the case in the same section as the USB to serial adapter. The connectors are quite deep, so they required a lot of space behind their mounting plate.

On one end of the case there is a cutout for the USB to serial board and a reset switch for the Arduino in the form of a big red button. It's not exactly an emergency stop button but should have a similar effect.
On the other end is an extra gx16 connector for power and a switch that will act as a power switch if a PC PSU is used. The switch is designed to connect or disconnect the ATX PS_ON line instead of being directly in line with the 12 volt input, which would require a sturdier switch. There is space for mounting a much smaller alternative switch, but I went with a large toggle in the end.
Each end of the case has a grille and mounting holes for a 45mm fan should extra cooling be required.
In order to keep the cables for the steppers tidy, I slipped on two pieces of heat shrink over the paracord sheaths I added. These keep the ends of the paracord neat at each end of the cable and provide a bit more bulk so the strain relief in the connectors has something to grip.