STOMP STOMP STOMP STOMP
I've been a bit quiet on here for a while, and slacking on the PCB milling experiments I've been meaning to do, though I have made some progress on that front.
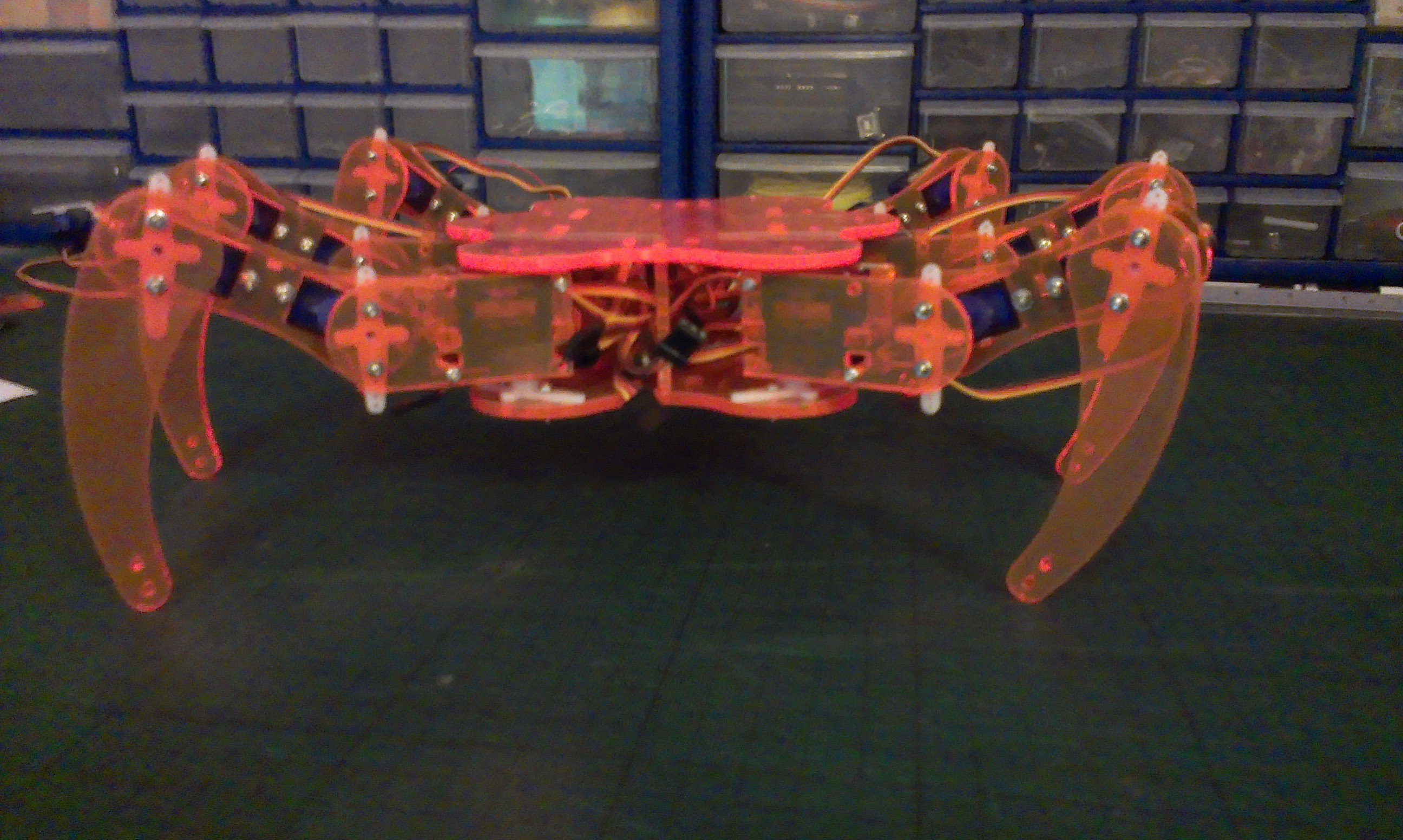
Anyway, here's what I got sidetracked by building:
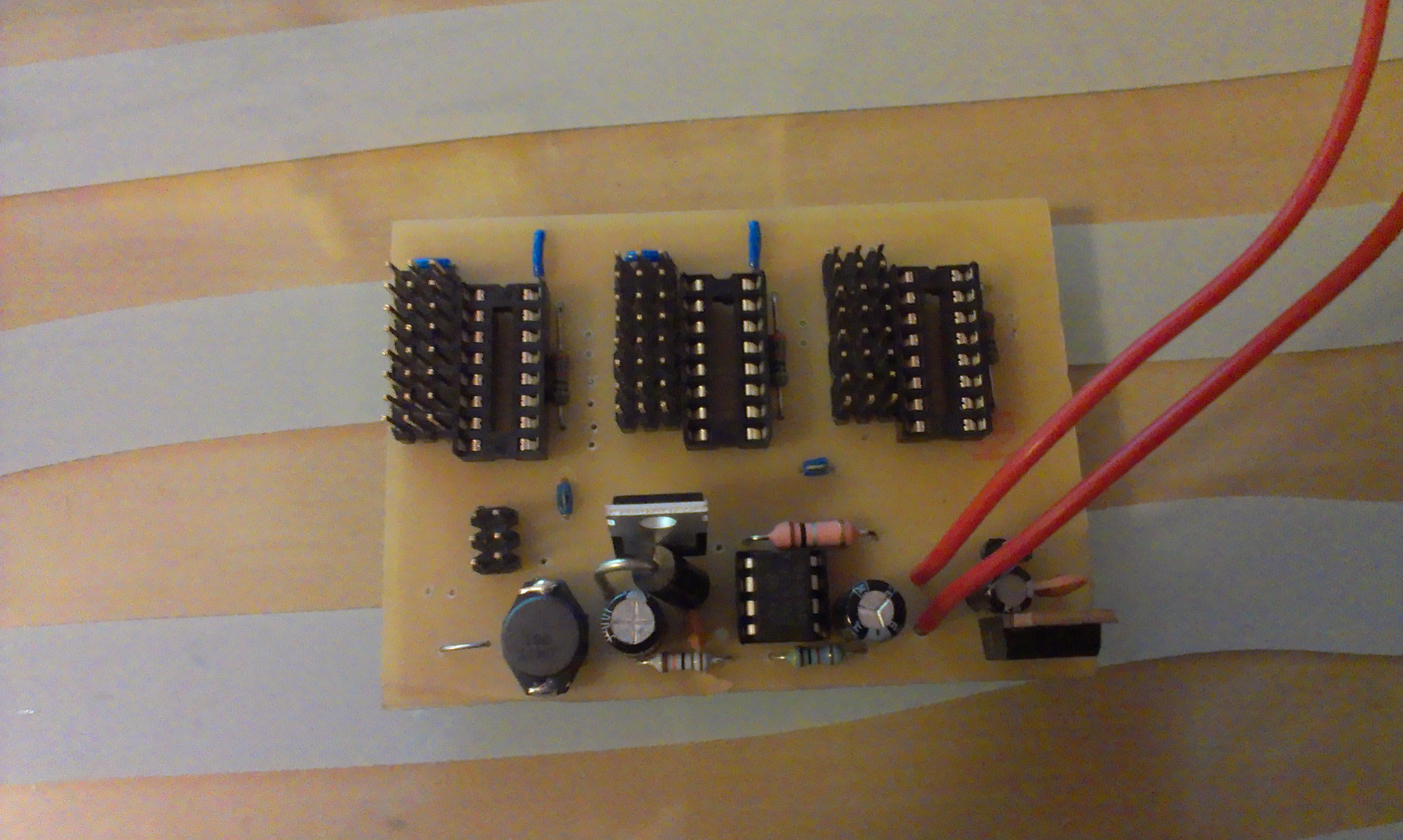
This is a small budget hexapod, using 18 of the cheapest servos I could find (£2.50 each). It uses a custom board with a power supply and 3 shift registers to control the servos. This in turn is controlled through an SPI bus to a Minimus USB AVR board, pretending to be a USB to serial device. The data sent over the serial line is interpreted as servo IDs followed by the desired position of the servo.
The control software I wrote for the hexapod can run on any Linux computer with a USB port. For dev I use a netbook but it also runs nicely on a Raspberry Pi.
The original plan was to use the Raspberry Pi's SPI port to control the servo board directly, unfortunately due to Linux's scheduling not being particularly real time even in real time mode there was a lot of timing jitter leading to real life servo jitter. Switching to the Minimus meant having a very dedicated if much slower CPU generating the pulses resulting in much smoother control of the servos.
I'll hopefully post a full making of post on the hexapod soon, but for now I just wanted to post a video of some stomping!